Just like every year, the Embedded World took place in Nürnberg in mid-March. It was a great show, and it felt busier than last year. That feeling was supported by the numbers released by the conference, which show 13% more visitors than in 2025!

The increase in attendance was despite another year with travel difficulties. It seems the Embedded World cannot catch a break! Last year, an airport strike on the Monday before the show caused many people to get their trips cancelled. This year, all train and car traffic to the Messe was stopped for a few hours at the start of the first day (Tuesday) due to a bomb from the Second World War being found close to the tracks (it was all taken care of safely). At the end of the show, Lufthansa pilots went on strike, causing many issues with the return trips for attendees. I guess this latter problem might have increased attendance on the last day, though… Better luck in 2027, I guess!
For the first time, VLAB was exhibiting at the Embedded World. VLAB had a demo pod in the Cadence booth, alongside demos of Cadence Automotive and hardware security solutions. We had some long days with an almost constant stream of visitors asking questions about VLAB and virtualization – what it is, how it works, what it can do.

As usual, we had a professional barista in the Cadence booth, entertaining our guests with coffee made to order. You can spot him just behind the VLAB pod in the photo above. The FlowCAD booth was on the other side of the “block”, just behind the barista.

The show was so busy that it was hard to find time to walk the floor to see what was going on in the industry. But it was not hard to spot the main themes just from a brief walk around.
AI – AI was everywhere. Most booths had demos featuring AI or machine learning. Any hardware can be made to run AI in some form. Tiny microcontrollers can run small models, while dedicated accelerators can host full-blown (local) LLMs. Software companies showed off ways to implement AI, as well as AI being used in tools to automate debug and coding.

Robots – Robots and robotics were just as common as AI. Some companies brought in full-size industrial arms, while others settled for small toy-level arms. Compared to previous years, there were fewer cars around the floor – they were still there, just not as many. And make no mistake, automotive is still a ubiquitous application area for tools and hardware. Several booths featured driving simulators.
On the software side, RISC-V is still hot. Tool companies showed debuggers and compilers for RISC-V, often combined with the Rust programming language. There is a sense of robustness, safety, and security becoming more of a priority in embedded, and that brings with it the need not just for better tools but also better languages and methodologies. Rust fits well with that trend.
The VLAB demo pod featured a few demos (obviously) of what VLAB can do and how you can use it for software testing and debug.
The first demo demonstrated software testing using the Vector SIL Adapter for software-in-the-loop (SIL) testing. The SIL Adapter runs the software under test on hardware (or virtual hardware) without requiring an operating system on the target or a network connection to communicate with the target. Test control and test data are provided to the target over a debugger connection.
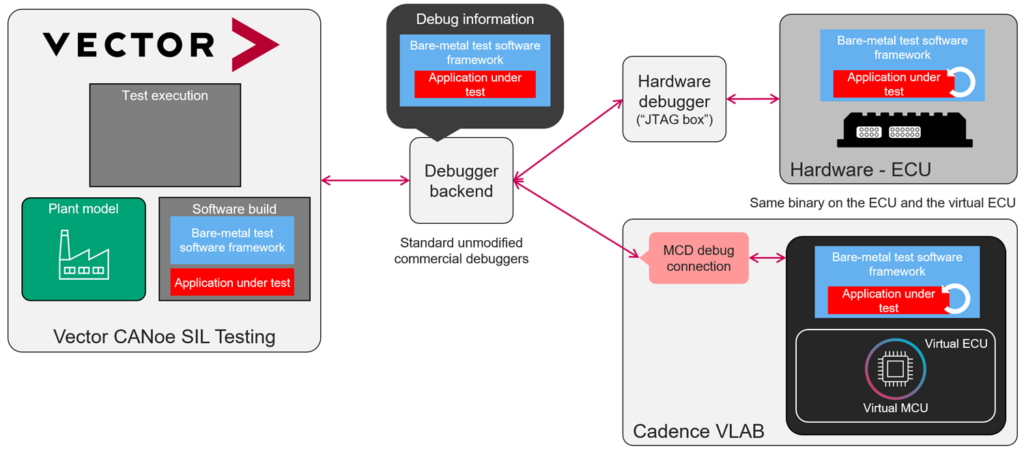
The exact same setup works on hardware boards and a VLAB virtual platform. Both setups, physical and virtual, run the same binary. Both setups use the same debugger backends (Lauterbach and Tasking) to communicate with the targets. From the perspective of the CANoe tool, the virtual and physical hardware look identical. The difference is hidden in the debugger layer, which uses either a physical debug probe or the MCD protocol to access the target system.
The second demo showed agentic AI analyzing and fixing a software problem autonomously. The VLAB virtual ECU runs a charger-station demo from the Zephyr project, which requires a network connection to a management system. However, when the target system boots, networking fails to initialize and the software does not work.
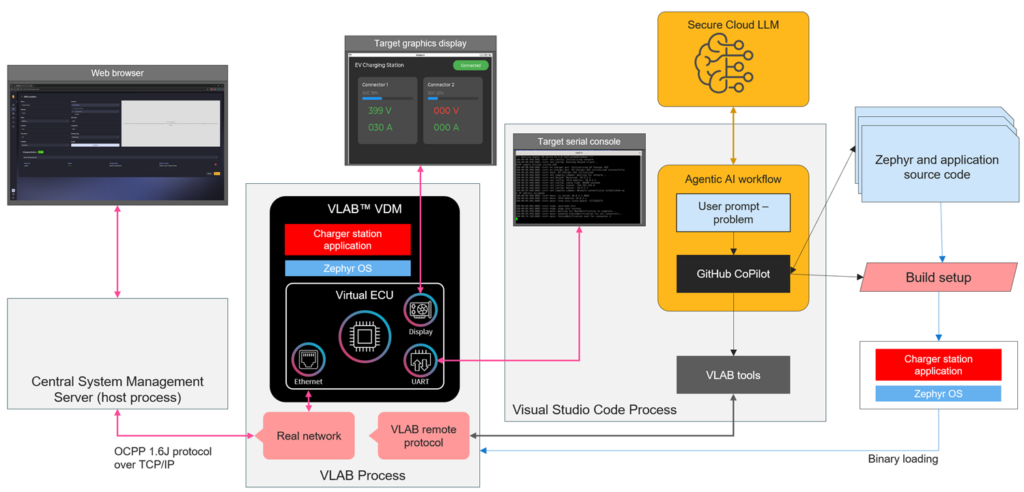
The AI agent accesses VLAB through the Visual Studio Code VLAB tools, investigating the problem from several angles. It examines the target system’s serial output, the target system’s hardware hierarchy, and the source code of the software. The issue, a misconfiguration in the device tree, is resolved and the resulting changes rebuilt and retested.
The Tasking booth featured a demo with the winIDEA debugger and a VLAB model of a future Renesas Arm-based automotive SoC. The virtual SoC was shown alongside physical ECUs and debug probes, demonstrating the continuum from pre-silicon to post-silicon and production debug that is enabled by debugger connections from virtual platforms.
WinIDEA is one of the debuggers used in the software testing demo discussed above. As already mentioned, it uses the MCD protocol to connect to VLAB. This enables all debugger features – including debug and tracing.
AUMOVIO showed a very different type of demo with VLAB. In this case, a VLAB model of an MCU was integrated into an ECU-level simulation that also included a model of an electronically resettable fuse. The ECU model, in turn, was integrated into a system-level model that included some (simulated) electrical components.
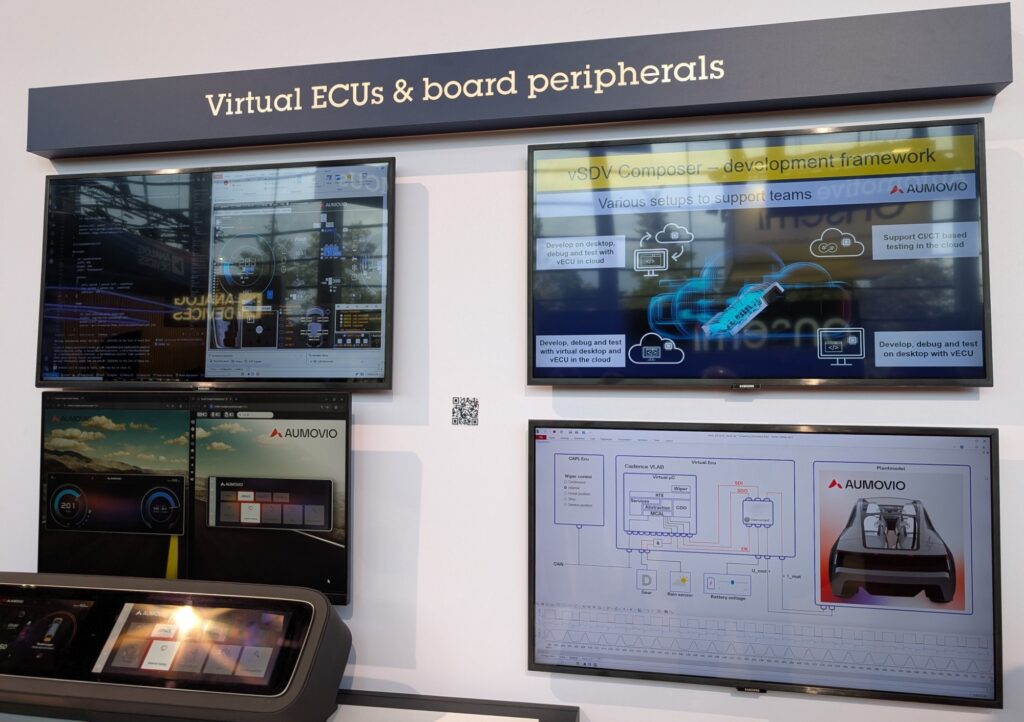
The software on the ECU controls a windshield wiper. As the user selects different modes, the animation on the display on the right shows the wiper’s behavior. It is also possible to simulate an overload of the electric motor, whereupon the electronic fuse would trigger and protect the system.
The demo provides a good example of how a virtual ECU includes models of digital components, analog components, and the external world. Such a virtual ECU allows software to be tested in both nominal and exceptional situations.
The Embedded World is a perfect example of why physical trade shows matter. It is very efficient and effective to gather the industry in a single place for a few days to meet, demo, and discuss. We will back next year with new innovations and technologies to showcase!